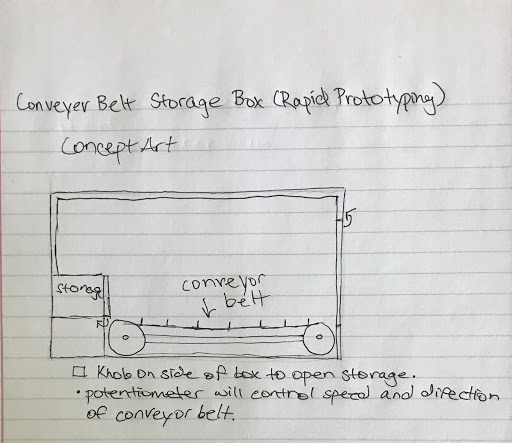
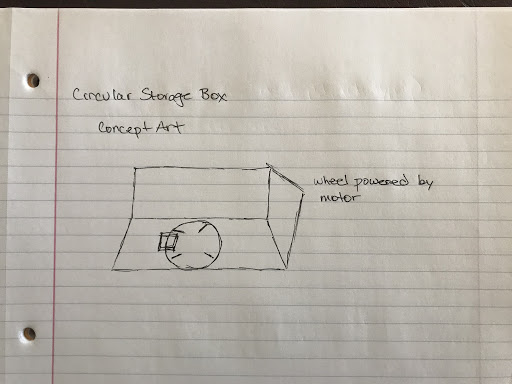
At the start of this assignment, I thought of trying to base my idea on a robot that gets me a tool or tools. To start the creation of that possible final project, I have thought of a conveyor belt storage box that stores my tools and revolves to bring me my tools, but I ultimately discarded this idea, out of concern for the mechanics of how I would organize the tools into the storage and opted for a more circular approach and get the materials back onto the belt.
Overall, I think that my model is underdeveloped. I would next time like to add more of a slower speed, multiple directions and interaction from user and model, where the model can turn to a specific degree which is inputed by the user through a string.
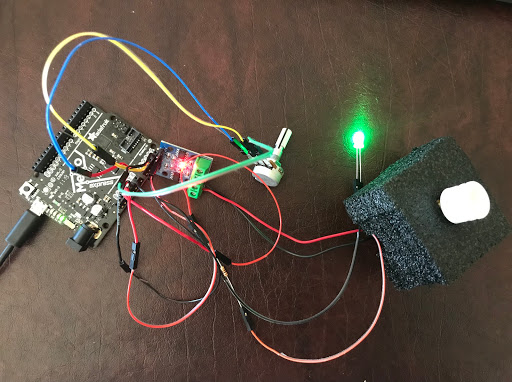
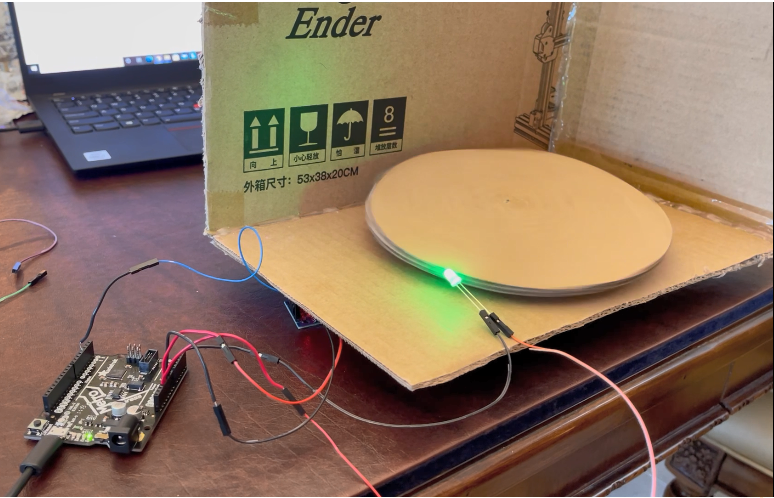
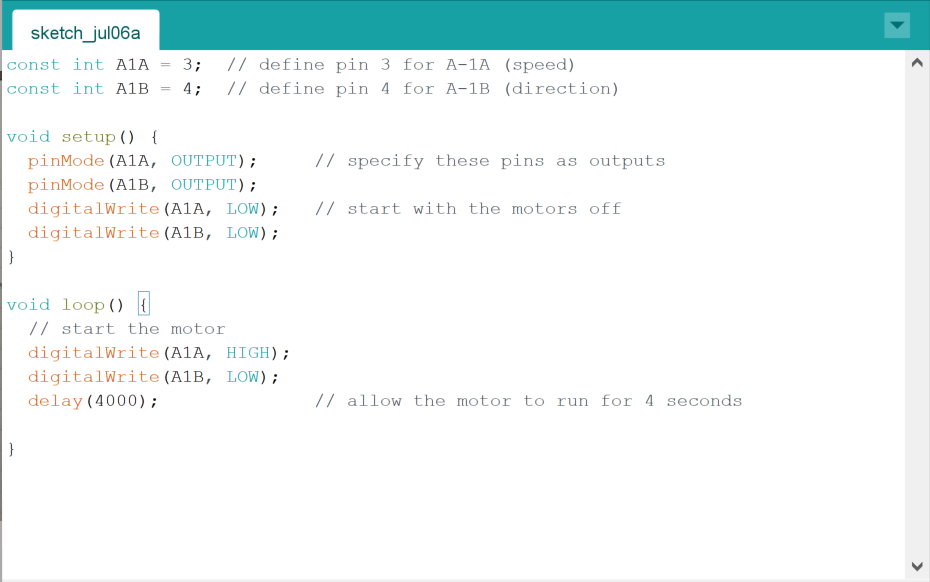
My second design is similar to a turning desktop organizer, but instead of being manual it would be autonomous. This meant that the user would just have to turn on the device for it to spin to get to the right area, where you want to store your object or tool. Then you can pull out the tool from its drawer. The green led light on the side is also used to indicate whether the autonomous desktop organizer is on. Some problems I came across were how to stabilize the spinning wheel, which I solved with a styrofome. Here is my circuitry and code: